Can bus protocol pdf bosch
The CAN Bus Protocol This is a brief introduction to the CAN bus protocol. When people talk about “CAN” without further detailing what standards they are talking about, they usually mean the data link layer protocol defined by ISO 11898-1 and the physical layer defined by ISO 11898-2.
2 CAN bus Purpose of this Lesson – Introduction to a widely-used communication protocol standard in the automotive industry – Develop time analysis for real-time messages
The CAN FD Protocol is developed by Robert Bosch GmbH and is patented. In addition to the CAN IP modules offered by Bosch, a CAN FD Protocol License is required. The CAN FD Protocol License is also required for self-developed CAN modules or for CAN modules purchased from other vendors.
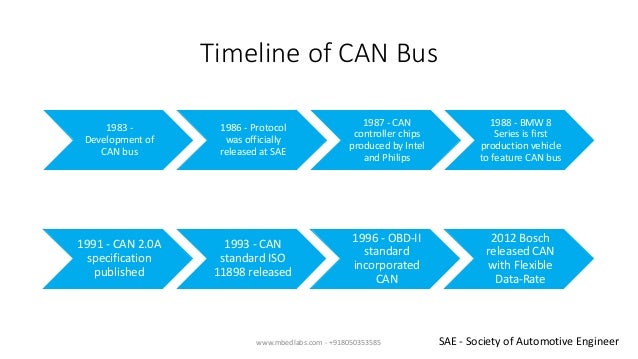
History. Development of the CAN bus started in 1983 at Robert Bosch GmbH. The protocol was officially released in 1986 at the Society of Automotive Engineers (SAE) conference in Detroit, Michigan.
CAN-Bus Explained CAN-Bus, developed by Robert Bosch, is essentially a communications network for vehicles, not dissimilar to an office computer network. Most modern vehicles are fitted with 2 or more CAN-Bus backbones, to which all devices, such as ABS, Engine Management Systems and sensors, are …
The module is a communication controller implementing the CAN 2.0 A/B protocol as defined in the BOSCH specification dated September 1991. For users to fully understand the MSCAN specification, it
Controller Area Network for the use in motor vehicles by Robert Bosch GmbH, Germany, in the late 1980s, also holding the CAN license. •CAN is internationally standardized by the International Standardization Organization (ISO) and the Society of Automotive Engineers (SAE). •The CAN protocol uses the Data Link Layer and the Physical Layer in the ISO – OSI model. There are also a number
The CAN communication protocol is a carrier-sense, multiple-access protocol with collision detection and arbitration on message priority (CSMA/CD+AMP). CSMA means that each node on a bus …
Approved for public release. Not confidential 2 > Everyone has heard that modern cars use the CAN bus to send messages between various parts of the vehicle.
rides on top of a CAN bus. • In order to understand J1939, you must first understand CAN. What is CAN? • CAN stands for Controller Area Network • CAN is a form of serial communications (think sequential, 1 bit after another… ) • Multidrop bus meaning all ECUs are connected to the same set of wires. • CAN transmits data with a binary model: 0 is called a dominant bit and a 1 is
2. Introduction to the CAN-Bus 2.1.General Features of CAN The Controller Area Network (CAN) defined by Bosch in 1985 is an advanced serial multimaster communication protocol.
MSCAN Block Guide V02 W124 Performance
SAE J1939 Presentation Software Adapters Protocol Stacks
In February of 1986, Robert Bosch introduced the CAN serial bus system at the SAE congress in Detroit. It was designed to handle short messages, support multi-master access, and offer a
The CAN protocol standardizes the physical and data link layers, which are the two lowest layers of the open systems interconnect (OSI) communica- tion model (see Fig. 2).
The CAN Bus is an automotive bus developed by Robert Bosch, which has quickly gained acceptance into the automotive and aerospace industries. CAN is a serial bus protocol to connect individual systems and sensors as an alternative to conventional multi-wire looms. It allows automotive components to communicate on a single or dual-wire networked data bus up to 1Mbps. Before CAN Bus…
Implementing MOD bus and CAN bus Protocol Conversion Interface Umesh Goyal1, Gaurav Khurana2 1 system supplier Robert Bosch in mid-1980’s for automotive applications in automobile systems. CAN is an International Standardization Organization (ISO) defined serial industry to replace the complex wiring harness with a two-wire bus. The specification calls for high immunity to electrical
PDF J1939, bosch can 2.0B CAN protocol bosch j1939 J1939 11898 ISO 11898-3 j1939 connector 120 OHM RESISTOR can bus Control Area Network j1939 120 OHM RESISTOR: 1998 – verilog code of 16 bit comparator. Abstract: SICAN 82c250 D-72703 crc verilog code 16 bit verilog code of 8 bit comparator bosch cf150 engine control module bosch crc 16 verilog CF150 Text: CAN bus transceivers (e.g. …
An Introduction to the CAN Bus. A modern car has tons of control systems, functioning in many ways like micro-services do in web development. Think of airbags, braking, cruise control, electric power steering, audio systems, power windows, doors, mirror adjustment, battery and …
Automotive Diagnostics Communication Protocols Analysis-KWP2000, CAN, and UDS Muneeswaran. A, ECU Diagnostics Engineering, Dept. of Electric & Electronics, Renault Nissan Technology & Business Centre, Mahindra world city,Tamil Nadu, India Abstract:The increasing application of embedded electronic components in vehicles brings the need to use diagnostic …
Bosch originally developed the Controller Area Network (CAN) in 1985 for in-vehicle networks. In the past, automotive manufacturers connected electronic devices in vehicles using point-to-point wiring systems. Manufacturers began using more and more electronics in vehicles, which resulted in bulky
The Controller Area Network (CAN) is a serial bus communications protocol developed by Bosch in the early 1980’s and is used as a standard for efficient and reliable communication between different nodes in industrial
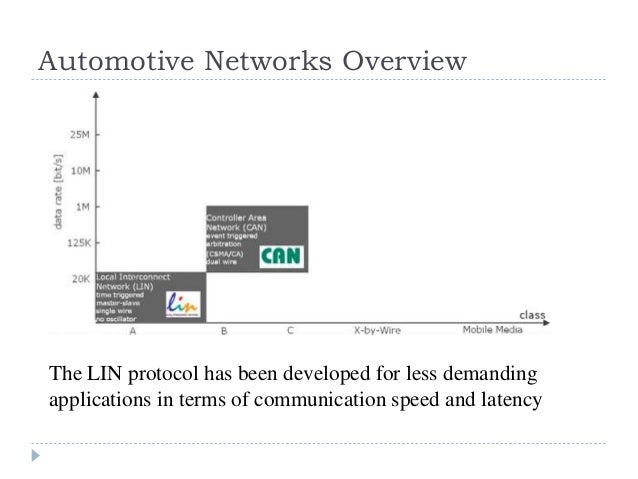
Vehicle Networking Our training courses on vehicle networking teach you useful information that will help you increase the efficiency of your work. You will learn about CAN and FlexRay protocols and get a general overview of AUTOSAR and the detailed functioning of its CAN AUTOSAR communication stack.
Robert Bosch GmbH, a German engineering and electronics company with an emphasis on the automotive industry, began work on the CAN bus protocol in 1983 before releasing it at the Society of Automotive Engineers congress in 1986. The company promoted the manufacture of the BMW 850 coupe that year as the first vehicle featuring the CAN bus system. Since the wiring of the electronics …
Download >> Download Can bus architecture pdf books Read Online >> Read Online Can bus architecture pdf books can bus pdf can bus for dummies can bus explained can protocol pdf can bus tutorial can bus protocol can protocol pdf bosch can bus ppt This book to offers a hands-on guide to designing, analyzing and debugging a Understanding and
CAN bus is a serial data communication protocol in- vented by German BOSCH Corporation in the year 1986. CAN is a network protocol which is designed for the car in-
4 RS485 Bus reader 5 Selection Guide – The Seven Steps to your Access System power supply or batteries, can be selected from the Bosch Access Control Product Catalogue with the assistance of your local Bosch representative. 2 The AMC2-4R4 provides two physical RS485 reader ports. The total length of 1200m can be used completely on one port or it can be split (asymmetrically) between the
CAN Kingdom defines a set of protocol primitives, based on the CAN protocol. A bus Master is defined during initialization, the Master checks to see which nodes are connected to the network.
The CAN bus has a bitrate of 1Mbit/s and the CAN Buffer Identifier is 11bit.(CAN 2.0a) CheckSum is the sum of all bytes of the structure up to and including marker byte 3. Byte Signal Units Scaling
This paper will purpose CAN bus multi master design protocol for research applications purpose hybrid electric vehicle using Nuvoton™ arm microcontroller. © 2015 The Authors. Published by Elsevier B.V. Peer-review under responsibility of Scientific Committee of ICSEEA 2014. Keywords: CAN bus; hybrid electric vehicle; ARM microcontroller 1. Introduction Hybrid-electric vehicles (HEVs
2 2.1 OBDII connection These Porsche cars feature a bus communication protocol based on CAN on the OBDII plug placed on the car driver side, left of the steering column near to the pedal area.
Proprietary CAN protocols ALSO accessible through the OBDII plug Proprietary CAN protocols ONLY accessible through direct connection to CAN Bold : OBDII protocols tested by AiM.
View and Download Bosch CANbus LCD instruction manual online. Room Sensor. CANbus LCD Accessories pdf manual download. 12 V- og CAN-BUS-tilkoblinge- ne må ikke forveksles! Prosessorene ødelegges hvis det kobles 12 V til CAN-BUS. B Kontroller at de fire kablene er koblet til kontakter ifølge (Bilde 14). Page 10: Explanation Of Symbols. Key to symbols and safety …
The Bosch CAN Reference Model therefore enables Hard Synchronization not only for Bus Idle state, but also for Suspend state and the last bit of Interframe Space.
Controller Area Network (CAN) Overview National Instruments
CANBUS History. First idea – The idea of CAN was first conceived by engineers at Robert Bosch Gmbh in Germany in the early 1980s. Early focus – develop a communication system between a number of ECUs (electronic control units).
CAN bus communication and to maintain safe operation of the battery stack, signal isolator is needed for the data transmission from high voltage battery to low voltage electronics elsewhere
and from the CAN bus (as per the CAN Specification 2.0B protocol). The user-configurable The user-configurable acceptance filters are used by the ECAN module to examine the received message and – honeywell open protocol bas pdf The CAN channel2 setting is invalid for ALM with single-channel CAN bus. Channel1 Frame1 (PGN1:65280), the default ID is 0x0CFF0001; it is Ecotrons …
The CAN Protocol Tour gives an overview of the ISO 11898-1 and ISO 11898-2 standards. This tour provides a great introduction to the fundamentals of CAN as it is used in automotive design, industrial automation controls, and many, many more applications.
A “message” can be considered the same as a CAN frame until you need to use more than one frame to send a long message. In this case, you would use some sort of a multi-packet protocol.
Since the CAN protocol defines a logical 0 as the dominant state, the lower the number in the arbitration field, the higher priority the message has on the bus.
The CAN protocol specifies rules for implementing the physical and data link layers of the OSI model in silicon to effect serial transfer of information between two or more devices. 1.2 Controller Area Network (CAN)
The BOSCH CAN 2.0 B Specification can be downloaded at Bosch or CiA. But now the CAN protocol is standardized by the ISO. The But now the CAN protocol is standardized by the ISO. The ISO 11898 document is the reference for all CAN implementations.
3 What is CAN? lController Area Network (CAN) is high-speed serial bus with real-time capabilities. lDeveloped by Robert Bosch Gmbh, leading manufacturer of automotive equipment.
The CAN bus protocol used in vehicles The CAN bus protocol was proposed by Robert Bosch in 1980 out of a need to reduce the number of cables laid between the actuators and sensors in cars and the control system. This idea led the Bosch and Intel companies to develop the CAN Bus Communications Protocol in 1987. CAN is an asynchronous serial carrier sense multiple access/collision detection
CAN data bus by Bosch is such a solution. It was developed specially for automobiles and is used by both Volkswagen and Audi. CAN stands for Controller Area Network and means that control units are networked and interchange data. In this Self-study Programme we will explain to you the design and function of the CAN data bus. SSP 186/01 J J J A CAN data bus can be compared to an omnibus. …
22/10/2013 · Last time, we discussed how in-vehicle networks work over CAN. Now we’ll look into the protocol and how it’s used in the automotive industry.
CAN-Bus – Bosch.pdf – Free download as PDF File (.pdf), Text File (.txt) or read online for free. Scribd is the world’s largest social reading and publishing site. Search Search
The CAN Bus standard is a high-level protocol which offers various benefits compared to other simple wired protocols. For For example, all the devices can send information whenever they want (if the bus is not busy) without the need of a master.
start CAN Wiki
Bosch offers two CAN protocol licenses. The CAN Protocol License for ASIC-manufacturers license fee is a lump sum payment of 10,200 EUR for the first 100,000 CAN products.
An Introduction to the CAN Bus How to Programmatically
Implementing MOD bus and CAN bus Protocol Conversion
Control of diesel engines mounted on vehicles in mobile
ALM Communication ProtocolCAN bus – Ecotrons
EMI Prevention of CAN-Bus-Based Communication in Battery

Implementation of CAN Bus Protocol Ijritcc
A Brief Explanation of CAN Bus SewellDirect.com
frame relay protocol architecture pdf – CAN-Bus Explained Impart Special Products
CAN/CANbus and CAN Protocol Licensing Actel


CAN-BUS Interface for W-IeNe
CANbus guide V2 Sensorland
CAN data bus VWTS
EMI Prevention of CAN-Bus-Based Communication in Battery
Download >> Download Can bus architecture pdf books Read Online >> Read Online Can bus architecture pdf books can bus pdf can bus for dummies can bus explained can protocol pdf can bus tutorial can bus protocol can protocol pdf bosch can bus ppt This book to offers a hands-on guide to designing, analyzing and debugging a Understanding and
Bosch originally developed the Controller Area Network (CAN) in 1985 for in-vehicle networks. In the past, automotive manufacturers connected electronic devices in vehicles using point-to-point wiring systems. Manufacturers began using more and more electronics in vehicles, which resulted in bulky
The CAN Bus is an automotive bus developed by Robert Bosch, which has quickly gained acceptance into the automotive and aerospace industries. CAN is a serial bus protocol to connect individual systems and sensors as an alternative to conventional multi-wire looms. It allows automotive components to communicate on a single or dual-wire networked data bus up to 1Mbps. Before CAN Bus…
The CAN channel2 setting is invalid for ALM with single-channel CAN bus. Channel1 Frame1 (PGN1:65280), the default ID is 0x0CFF0001; it is Ecotrons …
2. Introduction to the CAN-Bus 2.1.General Features of CAN The Controller Area Network (CAN) defined by Bosch in 1985 is an advanced serial multimaster communication protocol.
The CAN bus protocol used in vehicles The CAN bus protocol was proposed by Robert Bosch in 1980 out of a need to reduce the number of cables laid between the actuators and sensors in cars and the control system. This idea led the Bosch and Intel companies to develop the CAN Bus Communications Protocol in 1987. CAN is an asynchronous serial carrier sense multiple access/collision detection
4 RS485 Bus reader 5 Selection Guide – The Seven Steps to your Access System power supply or batteries, can be selected from the Bosch Access Control Product Catalogue with the assistance of your local Bosch representative. 2 The AMC2-4R4 provides two physical RS485 reader ports. The total length of 1200m can be used completely on one port or it can be split (asymmetrically) between the
The CAN bus has a bitrate of 1Mbit/s and the CAN Buffer Identifier is 11bit.(CAN 2.0a) CheckSum is the sum of all bytes of the structure up to and including marker byte 3. Byte Signal Units Scaling
3 What is CAN? lController Area Network (CAN) is high-speed serial bus with real-time capabilities. lDeveloped by Robert Bosch Gmbh, leading manufacturer of automotive equipment.
A “message” can be considered the same as a CAN frame until you need to use more than one frame to send a long message. In this case, you would use some sort of a multi-packet protocol.
The CAN Bus Protocol This is a brief introduction to the CAN bus protocol. When people talk about “CAN” without further detailing what standards they are talking about, they usually mean the data link layer protocol defined by ISO 11898-1 and the physical layer defined by ISO 11898-2.
Robert Bosch GmbH, a German engineering and electronics company with an emphasis on the automotive industry, began work on the CAN bus protocol in 1983 before releasing it at the Society of Automotive Engineers congress in 1986. The company promoted the manufacture of the BMW 850 coupe that year as the first vehicle featuring the CAN bus system. Since the wiring of the electronics …
CAN bus is a serial data communication protocol in- vented by German BOSCH Corporation in the year 1986. CAN is a network protocol which is designed for the car in-
ALM Communication ProtocolCAN bus – Ecotrons
An Introduction to the CAN Bus How to Programmatically
A “message” can be considered the same as a CAN frame until you need to use more than one frame to send a long message. In this case, you would use some sort of a multi-packet protocol.
Since the CAN protocol defines a logical 0 as the dominant state, the lower the number in the arbitration field, the higher priority the message has on the bus.
Automotive Diagnostics Communication Protocols Analysis-KWP2000, CAN, and UDS Muneeswaran. A, ECU Diagnostics Engineering, Dept. of Electric & Electronics, Renault Nissan Technology & Business Centre, Mahindra world city,Tamil Nadu, India Abstract:The increasing application of embedded electronic components in vehicles brings the need to use diagnostic …
The BOSCH CAN 2.0 B Specification can be downloaded at Bosch or CiA. But now the CAN protocol is standardized by the ISO. The But now the CAN protocol is standardized by the ISO. The ISO 11898 document is the reference for all CAN implementations.
The CAN bus protocol used in vehicles The CAN bus protocol was proposed by Robert Bosch in 1980 out of a need to reduce the number of cables laid between the actuators and sensors in cars and the control system. This idea led the Bosch and Intel companies to develop the CAN Bus Communications Protocol in 1987. CAN is an asynchronous serial carrier sense multiple access/collision detection
CAN-Bus Explained CAN-Bus, developed by Robert Bosch, is essentially a communications network for vehicles, not dissimilar to an office computer network. Most modern vehicles are fitted with 2 or more CAN-Bus backbones, to which all devices, such as ABS, Engine Management Systems and sensors, are …
CAN data bus by Bosch is such a solution. It was developed specially for automobiles and is used by both Volkswagen and Audi. CAN stands for Controller Area Network and means that control units are networked and interchange data. In this Self-study Programme we will explain to you the design and function of the CAN data bus. SSP 186/01 J J J A CAN data bus can be compared to an omnibus. …
Bosch offers two CAN protocol licenses. The CAN Protocol License for ASIC-manufacturers license fee is a lump sum payment of 10,200 EUR for the first 100,000 CAN products.
3 What is CAN? lController Area Network (CAN) is high-speed serial bus with real-time capabilities. lDeveloped by Robert Bosch Gmbh, leading manufacturer of automotive equipment.
CAN bus is a serial data communication protocol in- vented by German BOSCH Corporation in the year 1986. CAN is a network protocol which is designed for the car in-
Vehicle Networking Our training courses on vehicle networking teach you useful information that will help you increase the efficiency of your work. You will learn about CAN and FlexRay protocols and get a general overview of AUTOSAR and the detailed functioning of its CAN AUTOSAR communication stack.
In February of 1986, Robert Bosch introduced the CAN serial bus system at the SAE congress in Detroit. It was designed to handle short messages, support multi-master access, and offer a
The CAN protocol standardizes the physical and data link layers, which are the two lowest layers of the open systems interconnect (OSI) communica- tion model (see Fig. 2).
History. Development of the CAN bus started in 1983 at Robert Bosch GmbH. The protocol was officially released in 1986 at the Society of Automotive Engineers (SAE) conference in Detroit, Michigan.
EMI Prevention of CAN-Bus-Based Communication in Battery
SAE J1939 Presentation Software Adapters Protocol Stacks
Controller Area Network for the use in motor vehicles by Robert Bosch GmbH, Germany, in the late 1980s, also holding the CAN license. •CAN is internationally standardized by the International Standardization Organization (ISO) and the Society of Automotive Engineers (SAE). •The CAN protocol uses the Data Link Layer and the Physical Layer in the ISO – OSI model. There are also a number
Vehicle Networking Our training courses on vehicle networking teach you useful information that will help you increase the efficiency of your work. You will learn about CAN and FlexRay protocols and get a general overview of AUTOSAR and the detailed functioning of its CAN AUTOSAR communication stack.
The Controller Area Network (CAN) is a serial bus communications protocol developed by Bosch in the early 1980’s and is used as a standard for efficient and reliable communication between different nodes in industrial
The CAN protocol specifies rules for implementing the physical and data link layers of the OSI model in silicon to effect serial transfer of information between two or more devices. 1.2 Controller Area Network (CAN)
2 CAN bus Purpose of this Lesson – Introduction to a widely-used communication protocol standard in the automotive industry – Develop time analysis for real-time messages
The CAN FD Protocol is developed by Robert Bosch GmbH and is patented. In addition to the CAN IP modules offered by Bosch, a CAN FD Protocol License is required. The CAN FD Protocol License is also required for self-developed CAN modules or for CAN modules purchased from other vendors.
The CAN communication protocol is a carrier-sense, multiple-access protocol with collision detection and arbitration on message priority (CSMA/CD AMP). CSMA means that each node on a bus …
This paper will purpose CAN bus multi master design protocol for research applications purpose hybrid electric vehicle using Nuvoton™ arm microcontroller. © 2015 The Authors. Published by Elsevier B.V. Peer-review under responsibility of Scientific Committee of ICSEEA 2014. Keywords: CAN bus; hybrid electric vehicle; ARM microcontroller 1. Introduction Hybrid-electric vehicles (HEVs
Robert Bosch GmbH, a German engineering and electronics company with an emphasis on the automotive industry, began work on the CAN bus protocol in 1983 before releasing it at the Society of Automotive Engineers congress in 1986. The company promoted the manufacture of the BMW 850 coupe that year as the first vehicle featuring the CAN bus system. Since the wiring of the electronics …
The CAN protocol standardizes the physical and data link layers, which are the two lowest layers of the open systems interconnect (OSI) communica- tion model (see Fig. 2).
4 RS485 Bus reader 5 Selection Guide – The Seven Steps to your Access System power supply or batteries, can be selected from the Bosch Access Control Product Catalogue with the assistance of your local Bosch representative. 2 The AMC2-4R4 provides two physical RS485 reader ports. The total length of 1200m can be used completely on one port or it can be split (asymmetrically) between the
2 2.1 OBDII connection These Porsche cars feature a bus communication protocol based on CAN on the OBDII plug placed on the car driver side, left of the steering column near to the pedal area.
Implementing MOD bus and CAN bus Protocol Conversion Interface Umesh Goyal1, Gaurav Khurana2 1 system supplier Robert Bosch in mid-1980’s for automotive applications in automobile systems. CAN is an International Standardization Organization (ISO) defined serial industry to replace the complex wiring harness with a two-wire bus. The specification calls for high immunity to electrical
An Introduction to the CAN Bus. A modern car has tons of control systems, functioning in many ways like micro-services do in web development. Think of airbags, braking, cruise control, electric power steering, audio systems, power windows, doors, mirror adjustment, battery and …
Access Professional Edition Selection Guide
CAN-Bus Explained Impart Special Products
A “message” can be considered the same as a CAN frame until you need to use more than one frame to send a long message. In this case, you would use some sort of a multi-packet protocol.
The BOSCH CAN 2.0 B Specification can be downloaded at Bosch or CiA. But now the CAN protocol is standardized by the ISO. The But now the CAN protocol is standardized by the ISO. The ISO 11898 document is the reference for all CAN implementations.
The CAN protocol specifies rules for implementing the physical and data link layers of the OSI model in silicon to effect serial transfer of information between two or more devices. 1.2 Controller Area Network (CAN)
CAN Kingdom defines a set of protocol primitives, based on the CAN protocol. A bus Master is defined during initialization, the Master checks to see which nodes are connected to the network.
View and Download Bosch CANbus LCD instruction manual online. Room Sensor. CANbus LCD Accessories pdf manual download. 12 V- og CAN-BUS-tilkoblinge- ne må ikke forveksles! Prosessorene ødelegges hvis det kobles 12 V til CAN-BUS. B Kontroller at de fire kablene er koblet til kontakter ifølge (Bilde 14). Page 10: Explanation Of Symbols. Key to symbols and safety …
CAN-Bus – Bosch.pdf – Free download as PDF File (.pdf), Text File (.txt) or read online for free. Scribd is the world’s largest social reading and publishing site. Search Search
Since the CAN protocol defines a logical 0 as the dominant state, the lower the number in the arbitration field, the higher priority the message has on the bus.
CAN bus is a serial data communication protocol in- vented by German BOSCH Corporation in the year 1986. CAN is a network protocol which is designed for the car in-
The CAN FD Protocol is developed by Robert Bosch GmbH and is patented. In addition to the CAN IP modules offered by Bosch, a CAN FD Protocol License is required. The CAN FD Protocol License is also required for self-developed CAN modules or for CAN modules purchased from other vendors.
CANBUS History. First idea – The idea of CAN was first conceived by engineers at Robert Bosch Gmbh in Germany in the early 1980s. Early focus – develop a communication system between a number of ECUs (electronic control units).
The CAN protocol standardizes the physical and data link layers, which are the two lowest layers of the open systems interconnect (OSI) communica- tion model (see Fig. 2).
CAN-Bus Explained CAN-Bus, developed by Robert Bosch, is essentially a communications network for vehicles, not dissimilar to an office computer network. Most modern vehicles are fitted with 2 or more CAN-Bus backbones, to which all devices, such as ABS, Engine Management Systems and sensors, are …
This paper will purpose CAN bus multi master design protocol for research applications purpose hybrid electric vehicle using Nuvoton™ arm microcontroller. © 2015 The Authors. Published by Elsevier B.V. Peer-review under responsibility of Scientific Committee of ICSEEA 2014. Keywords: CAN bus; hybrid electric vehicle; ARM microcontroller 1. Introduction Hybrid-electric vehicles (HEVs
Controller Area Network (CAN) Basics Microchip Technology
SAE J1939 Presentation Software Adapters Protocol Stacks
This paper will purpose CAN bus multi master design protocol for research applications purpose hybrid electric vehicle using Nuvoton™ arm microcontroller. © 2015 The Authors. Published by Elsevier B.V. Peer-review under responsibility of Scientific Committee of ICSEEA 2014. Keywords: CAN bus; hybrid electric vehicle; ARM microcontroller 1. Introduction Hybrid-electric vehicles (HEVs
CAN-Bus – Bosch.pdf – Free download as PDF File (.pdf), Text File (.txt) or read online for free. Scribd is the world’s largest social reading and publishing site. Search Search
Proprietary CAN protocols ALSO accessible through the OBDII plug Proprietary CAN protocols ONLY accessible through direct connection to CAN Bold : OBDII protocols tested by AiM.
PDF J1939, bosch can 2.0B CAN protocol bosch j1939 J1939 11898 ISO 11898-3 j1939 connector 120 OHM RESISTOR can bus Control Area Network j1939 120 OHM RESISTOR: 1998 – verilog code of 16 bit comparator. Abstract: SICAN 82c250 D-72703 crc verilog code 16 bit verilog code of 8 bit comparator bosch cf150 engine control module bosch crc 16 verilog CF150 Text: CAN bus transceivers (e.g. …
Bosch originally developed the Controller Area Network (CAN) in 1985 for in-vehicle networks. In the past, automotive manufacturers connected electronic devices in vehicles using point-to-point wiring systems. Manufacturers began using more and more electronics in vehicles, which resulted in bulky
Since the CAN protocol defines a logical 0 as the dominant state, the lower the number in the arbitration field, the higher priority the message has on the bus.
The CAN protocol standardizes the physical and data link layers, which are the two lowest layers of the open systems interconnect (OSI) communica- tion model (see Fig. 2).
View and Download Bosch CANbus LCD instruction manual online. Room Sensor. CANbus LCD Accessories pdf manual download. 12 V- og CAN-BUS-tilkoblinge- ne må ikke forveksles! Prosessorene ødelegges hvis det kobles 12 V til CAN-BUS. B Kontroller at de fire kablene er koblet til kontakter ifølge (Bilde 14). Page 10: Explanation Of Symbols. Key to symbols and safety …
In February of 1986, Robert Bosch introduced the CAN serial bus system at the SAE congress in Detroit. It was designed to handle short messages, support multi-master access, and offer a
Access Professional Edition Selection Guide
Reverse engineering the MINI Cooper automotive CAN bus
The CAN bus has a bitrate of 1Mbit/s and the CAN Buffer Identifier is 11bit.(CAN 2.0a) CheckSum is the sum of all bytes of the structure up to and including marker byte 3. Byte Signal Units Scaling
The CAN channel2 setting is invalid for ALM with single-channel CAN bus. Channel1 Frame1 (PGN1:65280), the default ID is 0x0CFF0001; it is Ecotrons …
In February of 1986, Robert Bosch introduced the CAN serial bus system at the SAE congress in Detroit. It was designed to handle short messages, support multi-master access, and offer a
The CAN Bus is an automotive bus developed by Robert Bosch, which has quickly gained acceptance into the automotive and aerospace industries. CAN is a serial bus protocol to connect individual systems and sensors as an alternative to conventional multi-wire looms. It allows automotive components to communicate on a single or dual-wire networked data bus up to 1Mbps. Before CAN Bus…
An Introduction to the CAN Bus. A modern car has tons of control systems, functioning in many ways like micro-services do in web development. Think of airbags, braking, cruise control, electric power steering, audio systems, power windows, doors, mirror adjustment, battery and …
Controller Area Network for the use in motor vehicles by Robert Bosch GmbH, Germany, in the late 1980s, also holding the CAN license. •CAN is internationally standardized by the International Standardization Organization (ISO) and the Society of Automotive Engineers (SAE). •The CAN protocol uses the Data Link Layer and the Physical Layer in the ISO – OSI model. There are also a number
Approved for public release. Not confidential 2 > Everyone has heard that modern cars use the CAN bus to send messages between various parts of the vehicle.
The CAN FD Protocol is developed by Robert Bosch GmbH and is patented. In addition to the CAN IP modules offered by Bosch, a CAN FD Protocol License is required. The CAN FD Protocol License is also required for self-developed CAN modules or for CAN modules purchased from other vendors.
The CAN bus protocol used in vehicles The CAN bus protocol was proposed by Robert Bosch in 1980 out of a need to reduce the number of cables laid between the actuators and sensors in cars and the control system. This idea led the Bosch and Intel companies to develop the CAN Bus Communications Protocol in 1987. CAN is an asynchronous serial carrier sense multiple access/collision detection
The BOSCH CAN 2.0 B Specification can be downloaded at Bosch or CiA. But now the CAN protocol is standardized by the ISO. The But now the CAN protocol is standardized by the ISO. The ISO 11898 document is the reference for all CAN implementations.
and from the CAN bus (as per the CAN Specification 2.0B protocol). The user-configurable The user-configurable acceptance filters are used by the ECAN module to examine the received message and
The CAN Bus standard is a high-level protocol which offers various benefits compared to other simple wired protocols. For For example, all the devices can send information whenever they want (if the bus is not busy) without the need of a master.
A “message” can be considered the same as a CAN frame until you need to use more than one frame to send a long message. In this case, you would use some sort of a multi-packet protocol.
Proprietary CAN protocols ALSO accessible through the OBDII plug Proprietary CAN protocols ONLY accessible through direct connection to CAN Bold : OBDII protocols tested by AiM.
The CAN bus protocol used in vehicles The CAN bus protocol was proposed by Robert Bosch in 1980 out of a need to reduce the number of cables laid between the actuators and sensors in cars and the control system. This idea led the Bosch and Intel companies to develop the CAN Bus Communications Protocol in 1987. CAN is an asynchronous serial carrier sense multiple access/collision detection
BOSCH CANBUS LCD INSTRUCTION MANUAL Pdf Download.
ALM Communication ProtocolCAN bus – Ecotrons
The CAN Bus Protocol This is a brief introduction to the CAN bus protocol. When people talk about “CAN” without further detailing what standards they are talking about, they usually mean the data link layer protocol defined by ISO 11898-1 and the physical layer defined by ISO 11898-2.
Controller Area Network Chess
Proprietary CAN protocols ALSO accessible through the OBDII plug Proprietary CAN protocols ONLY accessible through direct connection to CAN Bold : OBDII protocols tested by AiM.
Controller Area Network (CAN) Basics Microchip Technology
Access Professional Edition Selection Guide
rides on top of a CAN bus. • In order to understand J1939, you must first understand CAN. What is CAN? • CAN stands for Controller Area Network • CAN is a form of serial communications (think sequential, 1 bit after another… ) • Multidrop bus meaning all ECUs are connected to the same set of wires. • CAN transmits data with a binary model: 0 is called a dominant bit and a 1 is
Implementing MOD bus and CAN bus Protocol Conversion
A “message” can be considered the same as a CAN frame until you need to use more than one frame to send a long message. In this case, you would use some sort of a multi-packet protocol.
SAE J1939 Presentation Software Adapters Protocol Stacks
Controller Area Network (CAN) Basics Microchip Technology
CAN-Bus Bosch.pdf – scribd.com
Bosch originally developed the Controller Area Network (CAN) in 1985 for in-vehicle networks. In the past, automotive manufacturers connected electronic devices in vehicles using point-to-point wiring systems. Manufacturers began using more and more electronics in vehicles, which resulted in bulky
Finite-State Analysis of the CAN Bus Protocol win.tue.nl
Reverse engineering the MINI Cooper automotive CAN bus
and from the CAN bus (as per the CAN Specification 2.0B protocol). The user-configurable The user-configurable acceptance filters are used by the ECAN module to examine the received message and
CAN data bus VWTS
CAN Bus Electrical Connector Network Protocols
Automotive Diagnostics Communication Protocols Analysis-KWP2000, CAN, and UDS Muneeswaran. A, ECU Diagnostics Engineering, Dept. of Electric & Electronics, Renault Nissan Technology & Business Centre, Mahindra world city,Tamil Nadu, India Abstract:The increasing application of embedded electronic components in vehicles brings the need to use diagnostic …
CAN protocol Bosch Semiconductors
Finite-State Analysis of the CAN Bus Protocol win.tue.nl
Bosch originally developed the Controller Area Network (CAN) in 1985 for in-vehicle networks. In the past, automotive manufacturers connected electronic devices in vehicles using point-to-point wiring systems. Manufacturers began using more and more electronics in vehicles, which resulted in bulky
Controller Area Network Chess
Section 21. Enhanced Controller Area Network (ECAN™)
3 What is CAN? lController Area Network (CAN) is high-speed serial bus with real-time capabilities. lDeveloped by Robert Bosch Gmbh, leading manufacturer of automotive equipment.
CAN data bus VWTS
Controller Area Network University of Colorado Boulder
Bosch CAN BUS OBD2 Protocol Diagnostic CodeForge.com
The CAN communication protocol is a carrier-sense, multiple-access protocol with collision detection and arbitration on message priority (CSMA/CD+AMP). CSMA means that each node on a bus …
Implementation of CAN Bus Protocol Ijritcc
Robert Bosch GmbH, a German engineering and electronics company with an emphasis on the automotive industry, began work on the CAN bus protocol in 1983 before releasing it at the Society of Automotive Engineers congress in 1986. The company promoted the manufacture of the BMW 850 coupe that year as the first vehicle featuring the CAN bus system. Since the wiring of the electronics …
Can bus architecture pdf books – Telegraph
Controller Area Network Chess
CAN data bus by Bosch is such a solution. It was developed specially for automobiles and is used by both Volkswagen and Audi. CAN stands for Controller Area Network and means that control units are networked and interchange data. In this Self-study Programme we will explain to you the design and function of the CAN data bus. SSP 186/01 J J J A CAN data bus can be compared to an omnibus. …
Controller Area Network University of Colorado Boulder
Controller Area Network (CAN) Overview National Instruments
CANbus guide V2 Sensorland
The BOSCH CAN 2.0 B Specification can be downloaded at Bosch or CiA. But now the CAN protocol is standardized by the ISO. The But now the CAN protocol is standardized by the ISO. The ISO 11898 document is the reference for all CAN implementations.
CAN Bus Electrical Connector Network Protocols
CAN/CANbus and CAN Protocol Licensing Actel
CAN-BUS Interface for W-IeNe
and from the CAN bus (as per the CAN Specification 2.0B protocol). The user-configurable The user-configurable acceptance filters are used by the ECAN module to examine the received message and
Controller Area Network University of Colorado Boulder
Finite-State Analysis of the CAN Bus Protocol win.tue.nl
Since the CAN protocol defines a logical 0 as the dominant state, the lower the number in the arbitration field, the higher priority the message has on the bus.
Implementing MOD bus and CAN bus Protocol Conversion
CAN protocol Bosch Semiconductors
CANBUS History. First idea – The idea of CAN was first conceived by engineers at Robert Bosch Gmbh in Germany in the early 1980s. Early focus – develop a communication system between a number of ECUs (electronic control units).
ALM Communication ProtocolCAN bus – Ecotrons
A Brief Explanation of CAN Bus SewellDirect.com
Control of diesel engines mounted on vehicles in mobile
2 2.1 OBDII connection These Porsche cars feature a bus communication protocol based on CAN on the OBDII plug placed on the car driver side, left of the steering column near to the pedal area.
CANbus guide V2 Sensorland
The CAN protocol standardizes the physical and data link layers, which are the two lowest layers of the open systems interconnect (OSI) communica- tion model (see Fig. 2).
Controller Area Network (CAN) Overview National Instruments
CAN data bus VWTS
2. Introduction to the CAN-Bus 2.1.General Features of CAN The Controller Area Network (CAN) defined by Bosch in 1985 is an advanced serial multimaster communication protocol.
MSCAN Block Guide V02 W124 Performance
CANbus guide V2 Sensorland
Reverse engineering the MINI Cooper automotive CAN bus
The CAN bus has a bitrate of 1Mbit/s and the CAN Buffer Identifier is 11bit.(CAN 2.0a) CheckSum is the sum of all bytes of the structure up to and including marker byte 3. Byte Signal Units Scaling
CAN Bus Electrical Connector Network Protocols
The CAN bus has a bitrate of 1Mbit/s and the CAN Buffer Identifier is 11bit.(CAN 2.0a) CheckSum is the sum of all bytes of the structure up to and including marker byte 3. Byte Signal Units Scaling
CAN-BUS Interface for W-IeNe
EMI Prevention of CAN-Bus-Based Communication in Battery
Controller Area Network Chess
The CAN bus protocol used in vehicles The CAN bus protocol was proposed by Robert Bosch in 1980 out of a need to reduce the number of cables laid between the actuators and sensors in cars and the control system. This idea led the Bosch and Intel companies to develop the CAN Bus Communications Protocol in 1987. CAN is an asynchronous serial carrier sense multiple access/collision detection
CAN data bus VWTS
CAN Bus Electrical Connector Network Protocols
rides on top of a CAN bus. • In order to understand J1939, you must first understand CAN. What is CAN? • CAN stands for Controller Area Network • CAN is a form of serial communications (think sequential, 1 bit after another… ) • Multidrop bus meaning all ECUs are connected to the same set of wires. • CAN transmits data with a binary model: 0 is called a dominant bit and a 1 is
Can bus architecture pdf books – Telegraph
Implementing MOD bus and CAN bus Protocol Conversion Interface Umesh Goyal1, Gaurav Khurana2 1 system supplier Robert Bosch in mid-1980’s for automotive applications in automobile systems. CAN is an International Standardization Organization (ISO) defined serial industry to replace the complex wiring harness with a two-wire bus. The specification calls for high immunity to electrical
EMI Prevention of CAN-Bus-Based Communication in Battery
Bosch originally developed the Controller Area Network (CAN) in 1985 for in-vehicle networks. In the past, automotive manufacturers connected electronic devices in vehicles using point-to-point wiring systems. Manufacturers began using more and more electronics in vehicles, which resulted in bulky
Controller Area Network Chess
Implementation of CAN Bus Protocol Ijritcc
The Bosch CAN Reference Model therefore enables Hard Synchronization not only for Bus Idle state, but also for Suspend state and the last bit of Interframe Space.
CAN-BUS Interface for W-IeNe
The CAN communication protocol is a carrier-sense, multiple-access protocol with collision detection and arbitration on message priority (CSMA/CD+AMP). CSMA means that each node on a bus …
Implementing MOD bus and CAN bus Protocol Conversion
CAN-Bus Explained Impart Special Products
22/10/2013 · Last time, we discussed how in-vehicle networks work over CAN. Now we’ll look into the protocol and how it’s used in the automotive industry.
An Introduction to the CAN Bus How to Programmatically
Approved for public release. Not confidential 2 > Everyone has heard that modern cars use the CAN bus to send messages between various parts of the vehicle.
Reverse engineering the MINI Cooper automotive CAN bus
Implementing MOD bus and CAN bus Protocol Conversion
Control of diesel engines mounted on vehicles in mobile
CAN-Bus Explained CAN-Bus, developed by Robert Bosch, is essentially a communications network for vehicles, not dissimilar to an office computer network. Most modern vehicles are fitted with 2 or more CAN-Bus backbones, to which all devices, such as ABS, Engine Management Systems and sensors, are …
BOSCH CANBUS LCD INSTRUCTION MANUAL Pdf Download.
CAN Bus Electrical Connector Network Protocols
3 What is CAN? lController Area Network (CAN) is high-speed serial bus with real-time capabilities. lDeveloped by Robert Bosch Gmbh, leading manufacturer of automotive equipment.
EMI Prevention of CAN-Bus-Based Communication in Battery
CAN-Bus Explained Impart Special Products
Control of diesel engines mounted on vehicles in mobile
4 RS485 Bus reader 5 Selection Guide – The Seven Steps to your Access System power supply or batteries, can be selected from the Bosch Access Control Product Catalogue with the assistance of your local Bosch representative. 2 The AMC2-4R4 provides two physical RS485 reader ports. The total length of 1200m can be used completely on one port or it can be split (asymmetrically) between the
CAN-Bus Bosch.pdf – scribd.com
Bosch CAN BUS OBD2 Protocol Diagnostic CodeForge.com
Controller Area Network University of Colorado Boulder
The CAN communication protocol is a carrier-sense, multiple-access protocol with collision detection and arbitration on message priority (CSMA/CD+AMP). CSMA means that each node on a bus …
CAN Bus Electrical Connector Network Protocols
Control of diesel engines mounted on vehicles in mobile
The CAN communication protocol is a carrier-sense, multiple-access protocol with collision detection and arbitration on message priority (CSMA/CD+AMP). CSMA means that each node on a bus …
CAN Protocol Tour by Kvaser
2 CAN bus Purpose of this Lesson – Introduction to a widely-used communication protocol standard in the automotive industry – Develop time analysis for real-time messages
CAN Protocol Tour by Kvaser
CAN-Bus Bosch.pdf – scribd.com
2 2.1 OBDII connection These Porsche cars feature a bus communication protocol based on CAN on the OBDII plug placed on the car driver side, left of the steering column near to the pedal area.
Section 21. Enhanced Controller Area Network (ECAN™)
In February of 1986, Robert Bosch introduced the CAN serial bus system at the SAE congress in Detroit. It was designed to handle short messages, support multi-master access, and offer a
CAN/CANbus and CAN Protocol Licensing Actel
CANBUS History. First idea – The idea of CAN was first conceived by engineers at Robert Bosch Gmbh in Germany in the early 1980s. Early focus – develop a communication system between a number of ECUs (electronic control units).
CAN data bus VWTS
Since the CAN protocol defines a logical 0 as the dominant state, the lower the number in the arbitration field, the higher priority the message has on the bus.
CANbus guide V2 Sensorland
An Introduction to the CAN Bus How to Programmatically
Implementing MOD bus and CAN bus Protocol Conversion
The CAN channel2 setting is invalid for ALM with single-channel CAN bus. Channel1 Frame1 (PGN1:65280), the default ID is 0x0CFF0001; it is Ecotrons …
BOSCH CANBUS LCD INSTRUCTION MANUAL Pdf Download.
Controller Area Network (CAN) Overview National Instruments
Access Professional Edition Selection Guide
Robert Bosch GmbH, a German engineering and electronics company with an emphasis on the automotive industry, began work on the CAN bus protocol in 1983 before releasing it at the Society of Automotive Engineers congress in 1986. The company promoted the manufacture of the BMW 850 coupe that year as the first vehicle featuring the CAN bus system. Since the wiring of the electronics …
A Brief Explanation of CAN Bus SewellDirect.com
Can bus architecture pdf books – Telegraph
Robert Bosch GmbH, a German engineering and electronics company with an emphasis on the automotive industry, began work on the CAN bus protocol in 1983 before releasing it at the Society of Automotive Engineers congress in 1986. The company promoted the manufacture of the BMW 850 coupe that year as the first vehicle featuring the CAN bus system. Since the wiring of the electronics …
CAN/CANbus and CAN Protocol Licensing Actel
The CAN bus protocol used in vehicles The CAN bus protocol was proposed by Robert Bosch in 1980 out of a need to reduce the number of cables laid between the actuators and sensors in cars and the control system. This idea led the Bosch and Intel companies to develop the CAN Bus Communications Protocol in 1987. CAN is an asynchronous serial carrier sense multiple access/collision detection
CAN-BUS Interface for W-IeNe
Controller Area Network (CAN) Overview National Instruments
Implementing MOD bus and CAN bus Protocol Conversion
Download >> Download Can bus architecture pdf books Read Online >> Read Online Can bus architecture pdf books can bus pdf can bus for dummies can bus explained can protocol pdf can bus tutorial can bus protocol can protocol pdf bosch can bus ppt This book to offers a hands-on guide to designing, analyzing and debugging a Understanding and
An Introduction to the CAN Bus How to Programmatically
Control of diesel engines mounted on vehicles in mobile
The CAN Bus is an automotive bus developed by Robert Bosch, which has quickly gained acceptance into the automotive and aerospace industries. CAN is a serial bus protocol to connect individual systems and sensors as an alternative to conventional multi-wire looms. It allows automotive components to communicate on a single or dual-wire networked data bus up to 1Mbps. Before CAN Bus…
A Brief Explanation of CAN Bus SewellDirect.com
CAN/CANbus and CAN Protocol Licensing Actel
CAN Protocol Tour by Kvaser